The Challenge: Make an robot that would catch a ball thrown in its vicinity.
The Approach: Use an omnidirectional robot that tracks and follows a thrown ball using computer vision in real time.
Selected Design Features:
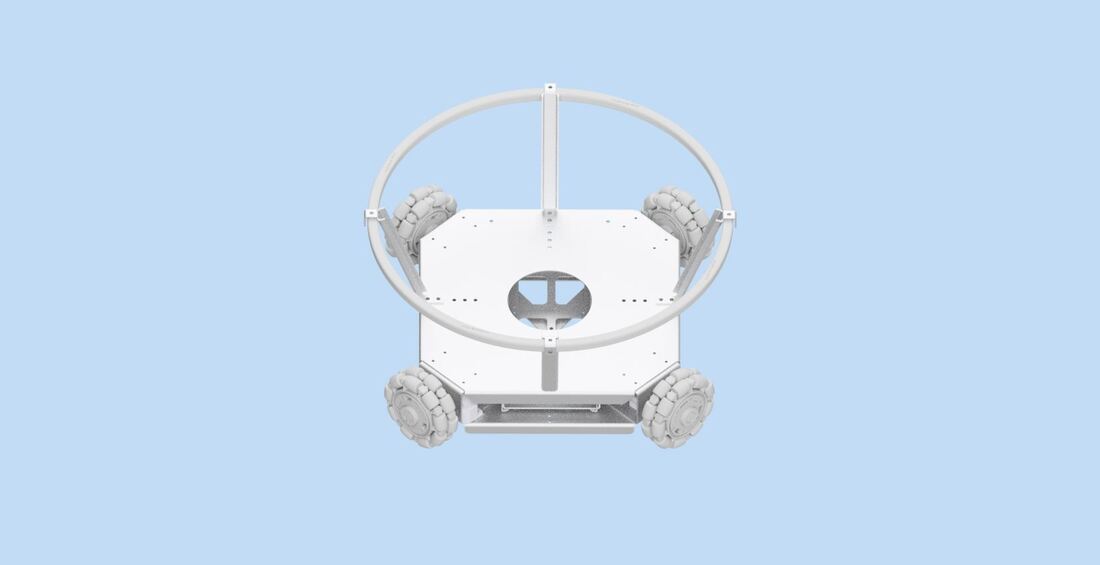
- An omnidirectional robot design was chosen for this project because of its maneuverability which allowed it to moving in any direction within a moment's notice.
- After modeling the robot in Autodesk Inventor, the robot's frame was plasma cut out of 1/16'' sheet metal, filed, and bent to shape. Sheet metal were used instead of 3D printed parts because it was easier to make and increased the rigidity. To compensate for the increased weight, the sheet metal was hollowed out in places nonessential to the construction of the robot.
- All the robot's component was to be placed on a sliding tray in the middle of the robot to allow for easy access.
- Textrix MAX motors were used for their combination of speed and torque which allowed a quick reaction time.
- VEX Omni Wheels were used because of their availability.
- The robot used a Raspberry Pi 3 B+ and an Arduino Mega in a master-slave setup to allow computer vision and PWM control of four TB6612FNG motor controllers respectively.
- The camera was to be mounted with a slightly tilted upwards on the inside of the hoop above robot. This would have allowed the robot to see a ball thrown in its forward direction.
- An omnidirectional robot design was chosen for this project because of its maneuverability which allowed it to moving in any direction within a moment's notice.
- After modeling the robot in Autodesk Inventor, the robot's frame was plasma cut out of 1/16'' sheet metal, filed, and bent to shape. Sheet metal were used instead of 3D printed parts because it was easier to make and increased the rigidity. To compensate for the increased weight, the sheet metal was hollowed out in places nonessential to the construction of the robot.
- All the robot's component was to be placed on a sliding tray in the middle of the robot to allow for easy access.
- Textrix MAX motors were used for their combination of speed and torque which allowed a quick reaction time.
- VEX Omni Wheels were used because of their availability.
- The robot used a Raspberry Pi 3 B+ and an Arduino Mega in a master-slave setup to allow computer vision and PWM control of four TB6612FNG motor controllers respectively.
- The camera was to be mounted with a slightly tilted upwards on the inside of the hoop above robot. This would have allowed the robot to see a ball thrown in its forward direction.
Loading Videos...
