
3D Print Removal With a Robot Arm
Oct 2019 - Dec 2019
As the proud owner of an Ender 3 3D printer, I know full well the irritating process that is 3D print removal. Thus, for my Intro to Robotics class I decided to take some inpiration from a Voodoo Manufacturing and automate the process. With my partner Jeonwoo Seo, we programmed the Baxter robot arm to remove 3D prints using computer vision.
Oct 2019 - Dec 2019
As the proud owner of an Ender 3 3D printer, I know full well the irritating process that is 3D print removal. Thus, for my Intro to Robotics class I decided to take some inpiration from a Voodoo Manufacturing and automate the process. With my partner Jeonwoo Seo, we programmed the Baxter robot arm to remove 3D prints using computer vision.
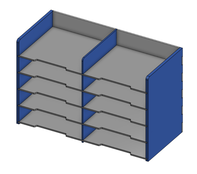
Configurable Shelves
October 2019
Formlabs currently does not provide a solution to storing their SLA resin tanks. At Fractal Hardware, we had a dozen of these tanks stacked on top of each other. I, the intern, was tasked with making custom shelves for them these tanks to improve their accessibility and general tidiness.
October 2019
Formlabs currently does not provide a solution to storing their SLA resin tanks. At Fractal Hardware, we had a dozen of these tanks stacked on top of each other. I, the intern, was tasked with making custom shelves for them these tanks to improve their accessibility and general tidiness.
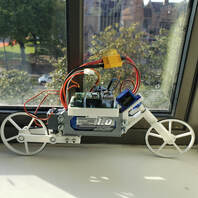
Ardubike
Jun 2019 - current
Ever since I watched Tsinghua University's self-balancing bike rolling down a track field, I've wanted one of my own. This summer I decided to make that dream come with my miniature bike. The plan is to have the bike stay upright by detecting the tilt in one direction and adjusting its front wheel to steer in the opposite direction. Currently, the bike is on training wheels.
Jun 2019 - current
Ever since I watched Tsinghua University's self-balancing bike rolling down a track field, I've wanted one of my own. This summer I decided to make that dream come with my miniature bike. The plan is to have the bike stay upright by detecting the tilt in one direction and adjusting its front wheel to steer in the opposite direction. Currently, the bike is on training wheels.

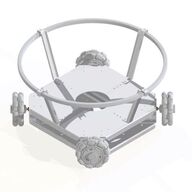
Mining Rover Excavation System
Aug 2019 - May 2019
As a member of Vanderbilt Robotics, I was tasked designing and machining various parts of a mining robot's excavation system for the NASA Mars Robotics Mining Challenge. The system was able to dig through moon-dust simulant and extract gravel.
Aug 2019 - May 2019
As a member of Vanderbilt Robotics, I was tasked designing and machining various parts of a mining robot's excavation system for the NASA Mars Robotics Mining Challenge. The system was able to dig through moon-dust simulant and extract gravel.
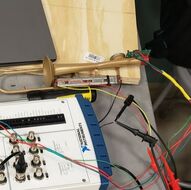
Electronic Trombone
Mar 2019 - Apr 2019
Rejoice amateur trombone players! You have to suffer no more. In collaboration with my group mates Jeonwoo Seo and John Mathena, we made an affordable electronic trombone that anyone can play after only a few minutes of practice. As my Instrumentation Lab final project, this device uses several sensors tied together with a LabVIEW program to function like a trombone. It is an instrument in both sense of the word.
Mar 2019 - Apr 2019
Rejoice amateur trombone players! You have to suffer no more. In collaboration with my group mates Jeonwoo Seo and John Mathena, we made an affordable electronic trombone that anyone can play after only a few minutes of practice. As my Instrumentation Lab final project, this device uses several sensors tied together with a LabVIEW program to function like a trombone. It is an instrument in both sense of the word.
Catchy Catchy Catcher
Mar 2018 - Jun 2018
Ever felt the shame of a missed three pointer at the garbage can? Well, I have and I decided to do something about it for my high school senior design project. I chose to make a omnidirectional robot that would catch whatever object thrown in its general direction using computer vision. With my partner Irene Li, we designed, machined, and wired the robot in the three months we were given to finish the project. The robot's computer vision program was left unfinished due to time constrains and our limited coding experience. So, the robot can't catch your garbage just yet.
Mar 2018 - Jun 2018
Ever felt the shame of a missed three pointer at the garbage can? Well, I have and I decided to do something about it for my high school senior design project. I chose to make a omnidirectional robot that would catch whatever object thrown in its general direction using computer vision. With my partner Irene Li, we designed, machined, and wired the robot in the three months we were given to finish the project. The robot's computer vision program was left unfinished due to time constrains and our limited coding experience. So, the robot can't catch your garbage just yet.
