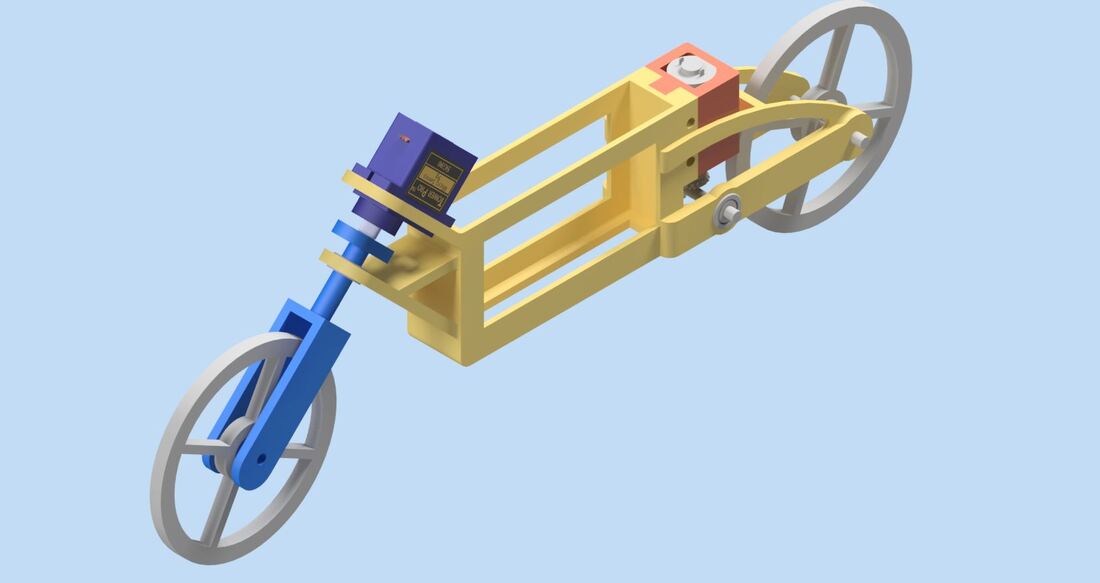
The Challenge: Make a miniature bike that drives itself with a limited budget.
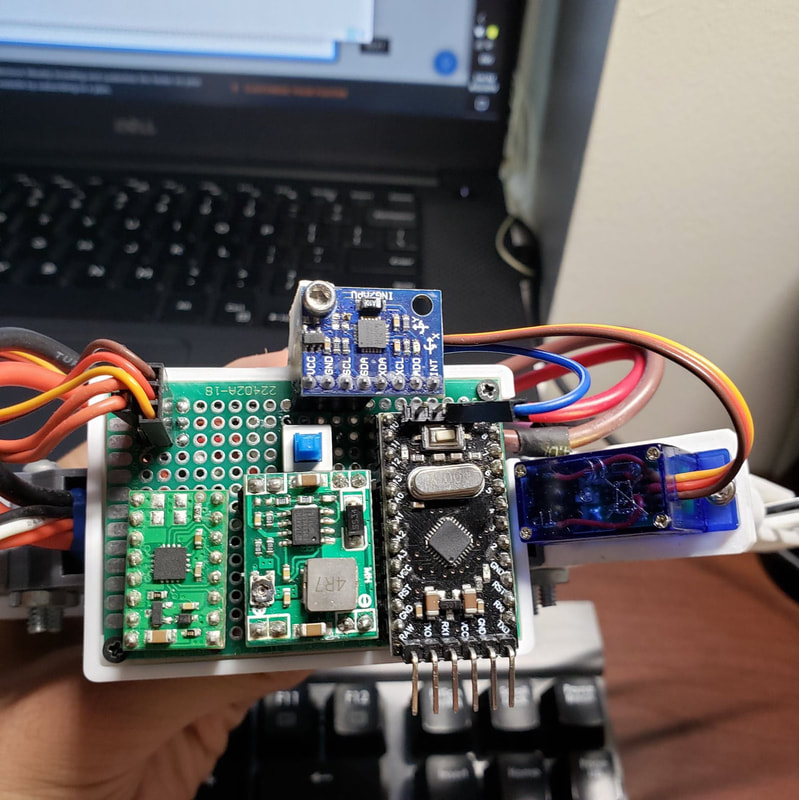
The Approach: Use an Arduino and an IMU to control the direction of a servo motor controlling the front wheel of the bike.
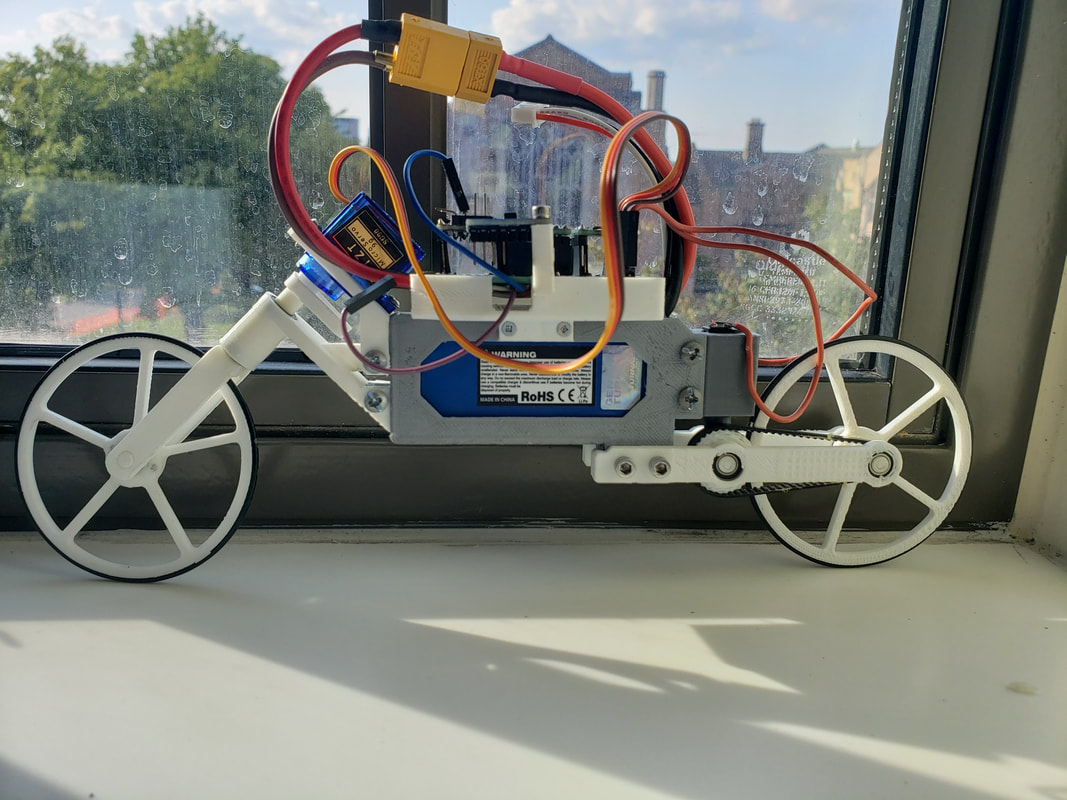
Note: This project is a work in progress, the bike still needs some tweaking in code and design to stay upright.
Hover over the images for details.
Hover over the images for details.
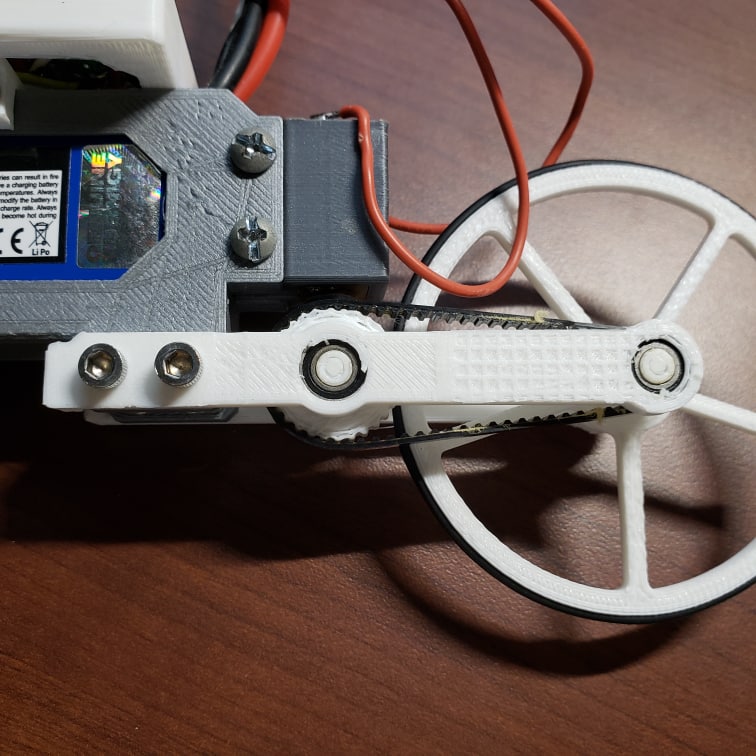
Design Features: