The Challenge: Create a mechanism that digs through BP1, a moon dust simulant, and extract gravel from the ground.
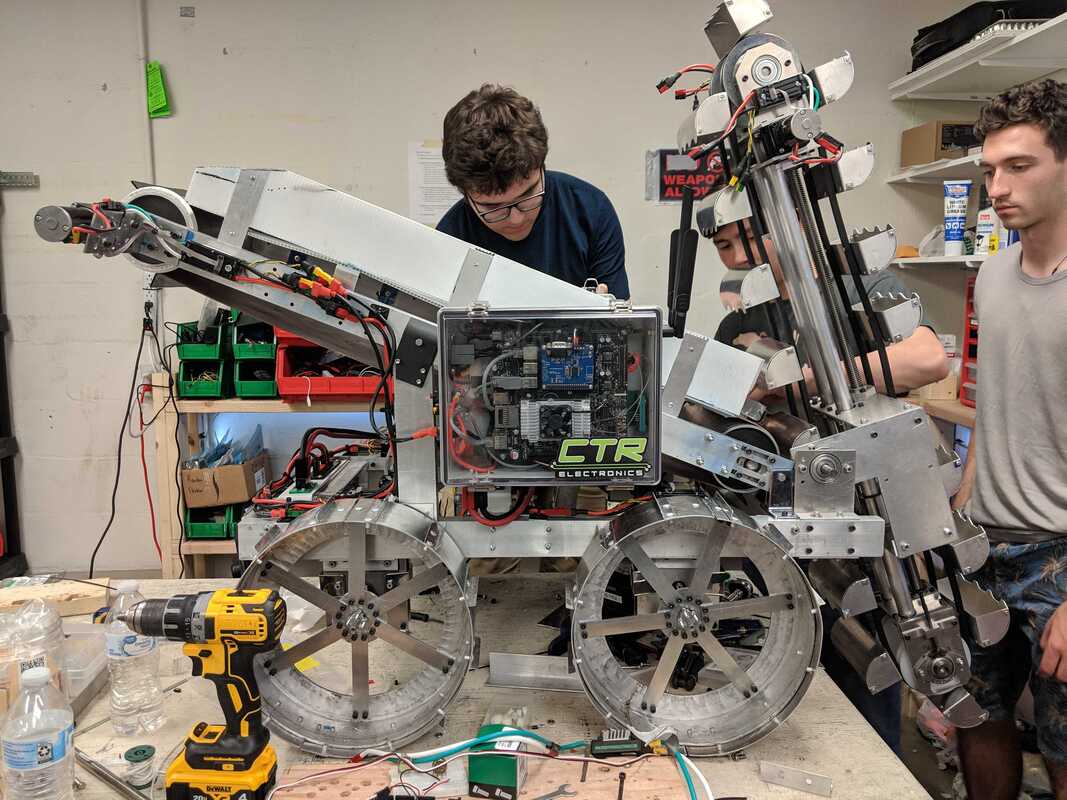
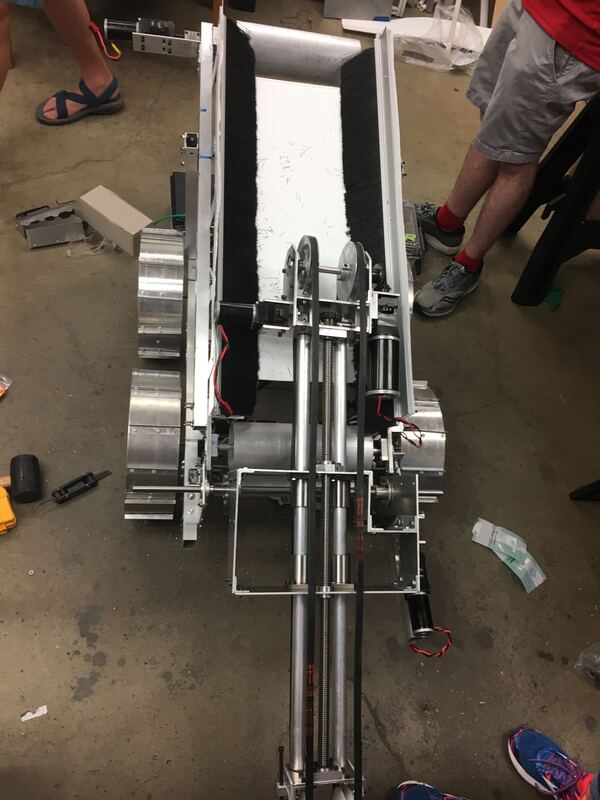
The Approach: Use a bucket chain system that extends into the ground as it excavates the ground below.
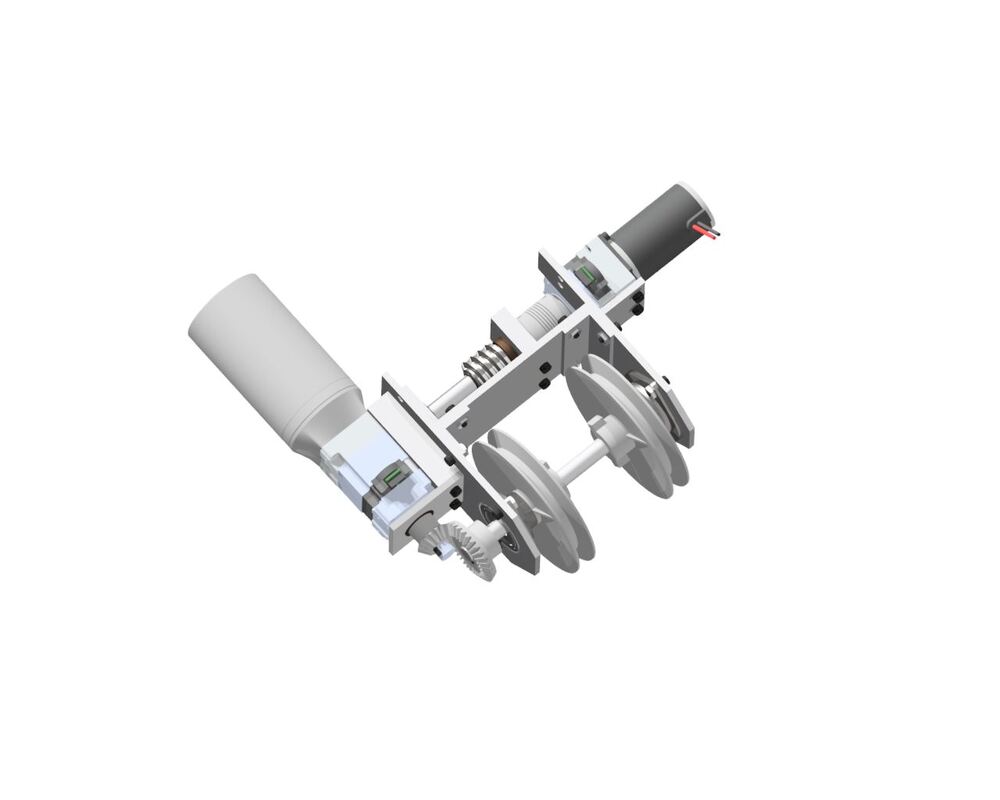
Design Features:
Hover over the images for details. Videos of the robot is on the bottom of the page.
Hover over the images for details. Videos of the robot is on the bottom of the page.



Loading Videos...
