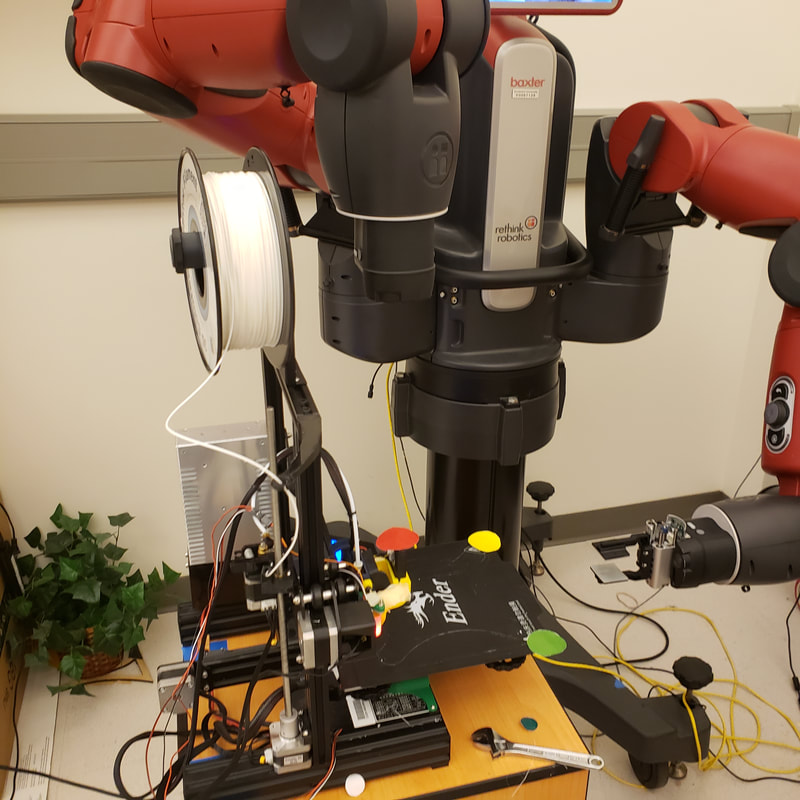
The Challenge: Automatically remove 3D prints from a 3D printer.
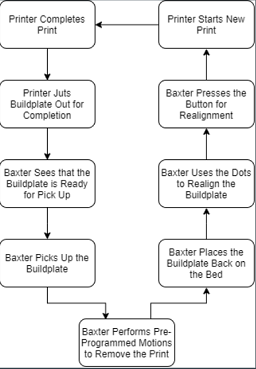
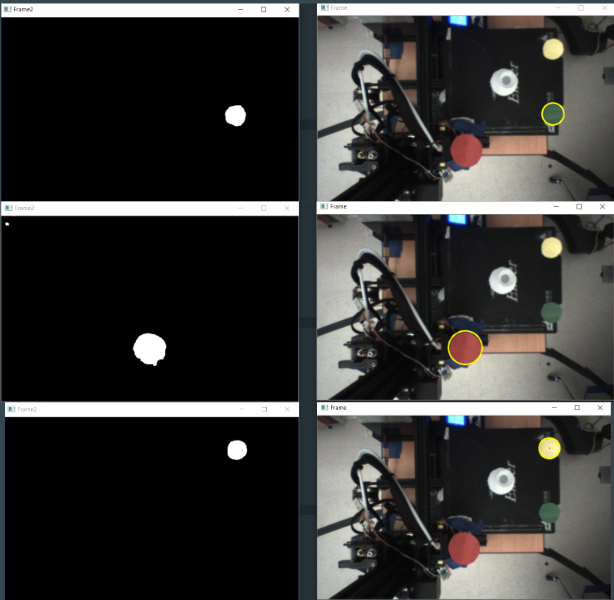
The Approach: Use the Robot Operating System (ROS) and OpenCV to control the Baxter robot arm such that it recognizes a finished print, removes the print, and starts another print.
Hover over the images for details.
Design Features:

Loading Videos...
